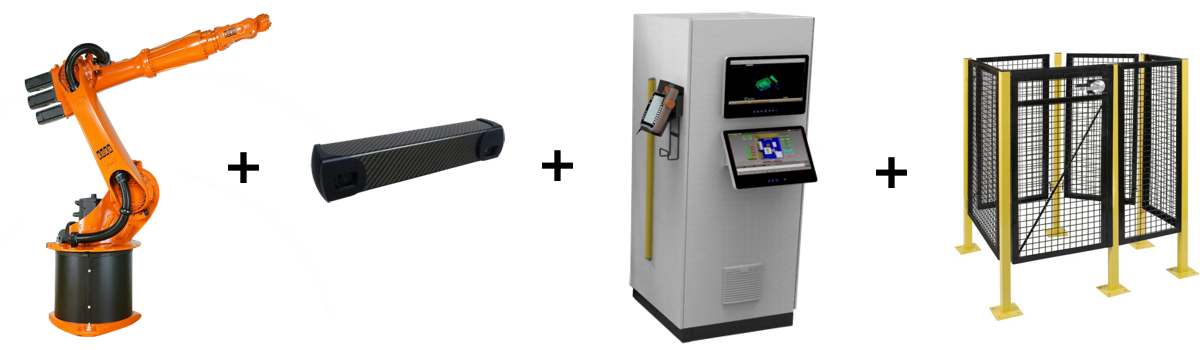
Robot
- payload – up to 20 kg
- long reach – up to 3.1 m
- number of axis = 6
- repeatability – <±0,05 mm
High Speed 3D Camera
- industry leading sensor
- high resolution 3D data capture
- advanced 3D object recognition
- point-cloud generation
Controller & Instrumentation Panel
- controls all workstation functions from object recognition to its final placement
- high-speed cycles – 5 to 7 seconds
Guarding Safety Mesh
- stainless steel
Industry leading 5 second cycle
Process
- pallet 3D scanning
- point cloud generation and object 3D visualization
- 3D image processing/finding of all required objects
- identification of object positioning in x,y,z axes
- advanced algorithm decides which object to pick up
- computation of robot arm trajectories and choice of best trajectory to pick up the object
- determination of pick up axis – x1, y1, z1
- determination of robotic arm gripper opening – jaw width
- determination of power and speed applied to gripper to pick up the object
- generation of robotic arm trajectory under restrictive conditions
- robotic arm trajectory realization, object pick up
- moving object to final destination
- cycle repeats


Advantages compared to competing products on the market
- Full integrity: a fully integrated solution for all subsystems of depalletization process (subsystem of preparing and implementing a model of a real object, subsystem of localization and determining the gripping position together with subsystem of gripping and subsequent imposition of an object)
- Adaptivity of the system: fully adaptive in terms of generating a model of a real object. It provides fully automated creation of the model of a real object, either directly scanned or loaded as a 3D CAD model
- Short period of implementation: implementation of models of new real objects is realized in 24 hours
- High reliability of localization and handling objects: combined technology of camera systems together with laser triangulation
- High speed of localization and manipulation of objects: total accumulated period of (1) scanning, (2) the localization of the object and (3) gripping and the subsequent imposition of the object can be 5 to 7 seconds.
- High robustness of the device: no limitations of surface and structural properties of the scanned object.


Return on Investment (ROI)
Break Even Point
1 Year 5 Months
Labor Cost Savings
$700,000
assumptions
total cost of system: $70,000
annual labor cost – 1 operator: $45,000
number of 8-hour shifts: 1
expected productivity gain: 27%
time period: 15 years
source: Robotic Industries Association
Productivity Savings
$189,000
ROI Chart
- Cumulative Cash Flow
- Cumulative Cash Flow